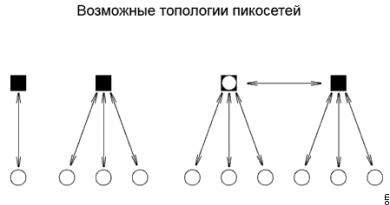
ระบบโจร. วิศวกรรมระบบวิทยุนำทางระยะสั้น วัตถุประสงค์และหลักการทำงานของระบบเรนจ์ไฟนเดอร์ DME
ระบบจะให้ข้อมูลต่อไปนี้บนเครื่องบิน:
เกี่ยวกับระยะทาง (ช่วงเอียง) ของเครื่องบินจากสถานที่ติดตั้งสัญญาณวิทยุ
เกี่ยวกับคุณสมบัติเด่นของสัญญาณวิทยุ
สามารถติดตั้งบีคอนวิทยุเรนจ์ไฟนเนอร์ร่วมกับบีคอนวิทยุแอซิมัท (PMA) ของ VOR หรือใช้โดยอัตโนมัติในเครือข่าย DME-DME
ในกรณีนี้บนเครื่องบิน ตำแหน่งของมันจะถูกกำหนดในระบบการวัดสองช่วงที่สัมพันธ์กับตำแหน่งของสัญญาณวิทยุ ซึ่งช่วยให้แก้ไขปัญหาการนำทางของเครื่องบินบนเส้นทางและในบริเวณสนามบิน
คำอธิบายของการออกแบบ vor/dme
ห้องฮาร์ดแวร์ได้รับการออกแบบโครงสร้างเป็นรูปตู้คอนเทนเนอร์ ดัดแปลงเพื่อติดตั้งอุปกรณ์หลักและอุปกรณ์ที่ให้บริการสภาพภูมิอากาศภายในห้องฮาร์ดแวร์
อุปกรณ์ที่ติดตั้งในห้องควบคุมประกอบด้วยตู้ PMA, ตู้ RMD และแผงป้อนข้อมูล อุปกรณ์ที่ให้สภาวะการทำงานปกติสำหรับ VOR/DME และเจ้าหน้าที่บำรุงรักษาประกอบด้วยเครื่องปรับอากาศ เครื่องทำความร้อน 2 เครื่อง และโคมไฟส่องสว่าง 5 ดวง ตู้ PMA ทำโครงสร้างในกล่องมาตรฐาน ผนังด้านขวาของตู้ด้านนอกมีทางเดิน UHF ซึ่งปิดด้วยฝาครอบป้องกันเพิ่มเติม ตู้แบ่งออกเป็นหกช่องเหมือนกัน มีการติดตั้งวงจรเรียงกระแสสองตัวในช่องด้านล่างช่องแรก ส่วนที่มีตัวกั้นได้รับการแก้ไขในช่องที่เหลือซึ่งมีการติดตั้งหน่วยการทำงานที่ทำในรูปแบบของเซลล์ที่ตัดเข้า
ตู้ RMD ผลิตในกล่องมาตรฐาน บนผนังด้านขวาของตู้ มีการติดตั้งอุปกรณ์ทั้งหมดที่รวมอยู่ในเครื่องขยายสัญญาณเสียงขั้นสุดท้ายและเส้นทาง RF ที่หุ้มด้วยปลอกป้องกันไว้ด้านนอก ความสูงของตู้แบ่งออกเป็นหกช่องแนวนอนซึ่งมีหน่วยการทำงานทั้งหมดตั้งอยู่
ข้อมูลทางเทคนิค v/dme
พารามิเตอร์หลักและคุณลักษณะทางเทคนิคของ VOR/DME สอดคล้องกับข้อกำหนดและคำแนะนำของ ICAO
ตู้ VOR (PMA) และ DME (RMD) ให้ความซ้ำซ้อน "เย็น" 100% สำหรับอุปกรณ์สร้างสัญญาณมอดูเลต อุปกรณ์มอดูเลตและขยายสัญญาณ ทางเดิน RF และอุปกรณ์ควบคุมและประมวลผลสัญญาณ การเปลี่ยนไปใช้อุปกรณ์สำรองข้อมูลจะเป็นไปโดยอัตโนมัติ เวลาในการเปลี่ยนเป็นอุปกรณ์สำรองข้อมูลไม่เกิน 10 วินาที เวลาเปิดเครื่องของสัญญาณวิทยุที่เตรียมไว้สำหรับการใช้งานคือไม่เกิน 2 นาที การควบคุม VOR/DME สามารถเป็นแบบโลคอลหรือระยะไกลได้
การควบคุมระยะไกลดำเนินการโดยใช้ชุดควบคุมระยะไกลผ่านสายสื่อสารแบบมีสาย (โทรศัพท์) ที่ระยะทาง 0.5 ถึง 10 กม. การส่งสัญญาณแสงและเสียงของสถานะ VOR/DME นั้นมาจากแผงข้อมูลซึ่งอยู่ห่างจากชุดควบคุมระยะไกลสูงสุด 500 ม. ระบบ VOR/DME ไม่จำเป็นต้องมีเจ้าหน้าที่บำรุงรักษาอยู่ตลอดเวลา ระบบควบคุมความร้อนช่วยให้แน่ใจว่าอุณหภูมิอากาศภายในห้องอุปกรณ์จะคงอยู่ในช่วงตั้งแต่ 5 ถึง 40° C
|
ลักษณะทางเทคนิคหลักของ VOR (РМА-90) |
|
|
ความคุ้มครอง: | |
|
ในระนาบแนวนอน | |
|
ในระนาบแนวตั้ง (สัมพันธ์กับพื้นผิวแนวสายตา) องศา |
ไม่เกิน 3 |
|
จากด้านล่างลูกเห็บ |
อย่างน้อย 40 |
|
จากด้านบนลูกเห็บในระยะ: |
ไม่น้อยกว่า 300 |
|
ที่ระดับความสูง 12,000 ม. กม |
ไม่น้อยกว่า 100 |
|
ที่ระดับความสูง 6000 ม. (ที่ครึ่งกำลัง) กม. ความแรงของสนามที่ขอบเขตของพื้นที่ครอบคลุม µV/m |
ไม่น้อยกว่า 90 |
|
โพลาไรเซชันของรังสี |
แนวนอน |
|
ข้อผิดพลาดของข้อมูลเกี่ยวกับราบที่จุดที่ระยะ 28 ม. จากศูนย์กลางเสาอากาศองศา |
ไม่เกิน 1 |
|
ความถี่ของช่องการทำงาน (การแกว่งของผู้ให้บริการ) หนึ่งในค่าที่ไม่ต่อเนื่องในช่วง |
108.000-117.975 เมกะเฮิรตซ์ ผ่าน 50 กิโลเฮิรตซ์ |
|
ส่วนเบี่ยงเบนความถี่ของผู้ให้บริการ, % | |
|
พลังสั่นสะเทือนของผู้ให้บริการ (ปรับได้), W |
จาก 20 ถึง 100 |
|
ขนาดและน้ำหนักโดยรวมของตู้ RMA |
496x588x1724 มม. ไม่เกิน 200 กก |
|
เส้นผ่านศูนย์กลางหน้าจอเสาอากาศ RMA | |
|
น้ำหนักเสาอากาศ RMA | |
|
ไม่มีหน้าจอ | |
|
พร้อมหน้าจอ | |
|
ลักษณะทางเทคนิคหลักของ DME (RMD-90) |
|
|
ความคุ้มครอง: | |
|
ในระนาบแนวนอน องศา | |
|
ในระนาบแนวตั้งจากด้านบน องศา |
อย่างน้อย 40 |
|
ตามระยะ กม.: | |
|
ที่ระดับความสูง 6,000 ม |
ไม่น้อยกว่า 200 |
|
ที่ระดับความสูง 12,000 ม |
ไม่ต่ำกว่า 260 |
|
โพลาไรเซชันของรังสี |
แนวตั้ง |
|
เกิดข้อผิดพลาดโดยบีคอนวิทยุในการวัดช่วง สำหรับ 95% ของการวัด m |
ไม่เกิน ± 75 |
|
ความถี่ช่องสัญญาณปฏิบัติการ MHz: |
ค่าที่ไม่ต่อเนื่องค่าใดค่าหนึ่ง (ทุกๆ 1 MHz) |
|
บุญธรรม |
ในช่วง 1025-1150 MHz |
|
กำลังส่งสัญญาณ |
ในช่วง 962-1213 MHz |
|
ส่วนเบี่ยงเบนความถี่ช่องการทำงาน, % |
ไม่เกิน ± 0.002 |
|
พลังคลื่นวิทยุ, W |
ไม่น้อยกว่า 500 |
|
จำนวนเครื่องบินที่ให้บริการพร้อมกัน |
ไม่เกิน 100 |
|
ขนาดและน้ำหนักโดยรวมของตู้ RMD |
1700x496x678 มม. ไม่เกิน 240 กก. |
|
ขนาดและน้ำหนักโดยรวมของเสาอากาศ RMD |
2180 x 260 มม. ไม่เกิน 18 กก |
|
ลักษณะทางเทคนิคหลักของ VOR/DME (РМА-90/РМД-90) |
|
|
ขนาดและน้ำหนักภายในของห้องอุปกรณ์ |
2000 x 3000 x 2000 มม., 2500 กก |
|
แหล่งจ่ายไฟ: | |
|
หลักและสำรองจาก 47...63 Hz |
220 โวลต์ (187...264 โวลต์), 50 เฮิรตซ์ (47...63 เฮิรตซ์) |
|
เหตุฉุกเฉินจากแบตเตอรี่เมื่อเวลาผ่านไป |
อย่างน้อย 30 นาที |
|
กำลังไฟฟ้าที่ใช้โดย VOR/DME (โดยเปิดใช้งานระบบควบคุมความร้อน) |
ไม่เกิน 3,000 VA |
|
พลังงานที่ใช้โดยอุปกรณ์หลักของบีคอน |
ไม่เกิน 500 VA |
|
สภาพการทำงานของอุปกรณ์ที่อยู่ในห้องควบคุม: | |
|
อุปกรณ์อุณหภูมิอากาศโดยรอบ |
จากลบ 10 ถึงบวก 50° C |
|
วางกลางแจ้ง: | |
|
อุณหภูมิโดยรอบ; |
จากลบ 50 ถึงบวก 50° C |
|
อากาศไหลด้วยความเร็ว | |
|
ความน่าเชื่อถือ | |
|
หมายถึงเวลาระหว่างความล้มเหลว |
ไม่น้อยกว่า 5,000 ชม |
|
ทรัพยากรทางเทคนิคโดยเฉลี่ย | |
|
อายุการใช้งานโดยเฉลี่ย | |
|
เวลาพักฟื้นโดยเฉลี่ย | |
ช่องสัญญาณ goniometric การนำทาง VOR ได้รับการออกแบบมาเพื่อกำหนดมุมราบของเครื่องบินที่สัมพันธ์กับจุดนำทางด้วยวิทยุซึ่งติดตั้งอุปกรณ์ภาคพื้นดินของระบบ ช่อง goniometric รวมถึงอุปกรณ์ภาคพื้นดินและทางอากาศ อุปกรณ์ภาคพื้นดินเป็นสัญญาณวิทยุที่ส่งสัญญาณการรับและการประมวลผลซึ่งบนเครื่องบินทำให้สามารถกำหนดราบได้ อุปกรณ์ออนบอร์ดเป็นตัวบ่งชี้ตัวรับสัญญาณซึ่งหลักการทำงานถูกกำหนดโดยวิธีการวัดแอซิมัทที่ใช้ในช่องสัญญาณ ด้วยการสร้างช่องอะซิมุธัลนี้ ความจุของช่องจึงไม่จำกัด ปัจจุบันมีการปรับเปลี่ยนหลักสามประการของระบบ goniometric ของช่วง MV:
ด้วยการวัดเฟสของซองการสั่นของ AM (VOR)
ด้วยการวัดเฟสแบบสองขั้นตอน (PVOR)
โดยใช้เอฟเฟ็กต์ดอปเปลอร์ (DVOR)
ว.อ
- บีคอน VOR มีเสาอากาศส่งสัญญาณสองเสา:
เสาอากาศรอบทิศทาง เอ 1มีรูปแบบทิศทาง (DNA) ในระนาบแนวนอน
เสาอากาศทิศทาง เอ 2โดยมีรูปแบบการแผ่รังสีในระนาบแนวนอน
ในทิศทางราบใดๆ ค่าของรูปแบบการแผ่รังสี เอ 2โดดเด่นด้วยขนาด
เสาอากาศ เอ 1
![]() (1.1)
(1.1)
ด้วยแอมพลิจูด
เสาอากาศ เอ 2ในทิศทางอะซิมุทัลใดๆ จะสร้างสนามแม่เหล็กขึ้นมา
ด้วยแอมพลิจูด ![]() . (1.3)
. (1.3)
โดยปกติแล้วสำหรับบีคอน VOR จะเป็นไปตามเงื่อนไข
รูปแบบการแผ่รังสีของเสาอากาศบีคอน VOR แสดงไว้ในรูปที่ 1 1.6(ก)
สัญญาณความถี่สูงถูกสร้างขึ้นโดยเครื่องส่งสัญญาณตัวเดียวและปล่อยออกมาจากเสาอากาศที่มีศูนย์กลางเฟสร่วม เมื่อฟิลด์ถูกเพิ่มเข้าไปในช่องว่าง สนามรวมของ PM รอบทิศทางจะถูกสร้างขึ้น (รูปที่ 1.6(b)) ![]() .
. 
ข้าว. 1.6. รูปแบบการแผ่รังสีเสาอากาศ VOR
เมื่อคำนึงถึงนิพจน์ (1.2) และ (1.3) จะสามารถแสดงค่าของฟิลด์ผลรวมได้
 . (1.4)
. (1.4)
รูปแบบทิศทาง เอ 2หมุนในระนาบแนวนอนด้วยความเร็วเชิงมุม
ที่ไหน n– ความถี่ในการหมุนด้านล่างต่อนาที
ระยะเวลาของการปฏิวัติหนึ่งครั้ง ตเท่ากับคาบการหมุน และ ความถี่ ความเร็ว VOR คือ n=1800 รอบต่อนาที (F=30 เฮิรตซ์).
ตำแหน่งลำแสง เอ 2(ตำแหน่งของจุดสูงสุด) เป็นฟังก์ชันของเวลา การหมุนเสาอากาศจะทำให้เกิดการเปลี่ยนแปลงเป็นระยะในสนามรวม ให้เราแสดงอัตราส่วนของแอมพลิจูดและเมื่อแทนค่าลงใน (1.4) เราจะได้
ผลลัพธ์ที่ได้คือฟิลด์ที่มีความลึกของการมอดูเลตแอมพลิจูด ความถี่การมอดูเลต และเฟสซองจดหมายที่ขึ้นกับอะซิมัท การสั่นที่ได้รับจากตัวรับสัญญาณออนบอร์ดสามารถแสดงได้ด้วยนิพจน์
ที่ไหน ถึง– ค่าสัมประสิทธิ์โดยคำนึงถึงการลดทอนของบัญชี
หลังจากขยายและตรวจจับแล้ว สามารถแยกแรงดันไฟฟ้าความถี่ต่ำได้
, (1.7)
ขั้นตอนประกอบด้วยข้อมูลเกี่ยวกับราบของเครื่องบิน:
. (1.8)
เพื่อแยกข้อมูลนี้บนเครื่องบิน จำเป็นต้องมีการสั่นสะเทือนอ้างอิงที่นำข้อมูลเกี่ยวกับตำแหน่งปัจจุบันของด้านล่าง ข้อมูลนี้จะต้องฝังอยู่ในเฟสการสั่นอ้างอิง ![]()
ด้วยค่าเฟสปัจจุบัน
(1.9)
สอดคล้องกับตำแหน่งเชิงมุมของก้นในเวลาที่กำหนด ที.
หากมีแรงดันอ้างอิงดังกล่าวบนเครื่องบิน ราบของเครื่องบินสามารถกำหนดเป็นความต่างเฟสระหว่างสัญญาณอ้างอิงกับสัญญาณอะซิมุทัล (1.8) และ (1.9):
เพื่อให้มิเตอร์บนเครื่องบินทำงานได้ จำเป็นต้องมีสัญญาณอ้างอิง ซึ่งจะเหมือนกันสำหรับเครื่องบินทุกลำ สัญญาณนี้จะต้องส่งผ่านช่องทางการสื่อสารที่แยกต่างหาก เพื่อลดช่องสัญญาณการสื่อสารความถี่ สัญญาณอ้างอิงในระบบเหล่านี้จะถูกส่งไปที่ความถี่พาหะเดียวกันกับความถี่แอซิมัททัล การแยกสัญญาณอะซิมุทัลและสัญญาณอ้างอิงออกเป็นช่องสัญญาณเกิดขึ้นที่ฝั่งรับโดยใช้วิธีการเลือกความถี่ของสัญญาณรวมที่ตรวจพบโดยแอมพลิจูด โอกาสนี้เกิดขึ้นเมื่อใช้การมอดูเลตความถี่แอมพลิจูดสองเท่าเพื่อส่งสัญญาณอ้างอิง
พิจารณาการก่อตัวของสัญญาณโดยอุปกรณ์ภาคพื้นดินและการทำงานของอุปกรณ์ออนบอร์ดโดยใช้ตัวอย่างบล็อกไดอะแกรมแบบง่ายของช่อง VOR (รูปที่ 1.7)
การสั่นของความถี่ความถี่สูงจะเกิดขึ้นในตัวส่งสัญญาณ (PRD) ในตัวแบ่งกำลัง (PD) สัญญาณ RF จะถูกแบ่งออกเป็นสองช่องสัญญาณ ส่วนหนึ่งของกำลังส่งไปที่เสาอากาศที่กำลังหมุน เอ 2- ความถี่ในการหมุนเสาอากาศถูกกำหนดโดยชุดควบคุม (CU) และมีค่าเท่ากับ เอฟ=30 เฮิรตซ์บีคอนวิทยุใช้วิธีการหมุนเสาอากาศหลายวิธี ในบีคอนวิทยุเครื่องแรก เสาอากาศจะหมุนตามกลไกโดยใช้มอเตอร์ไฟฟ้า อีกวิธีหนึ่งเกี่ยวข้องกับการใช้ระบบเสาอากาศโกนิโอเมตริก ต่อมาได้มีการพัฒนาวิธีการสำหรับการหมุนด้านล่างแบบอิเล็กทรอนิกส์ (วิธีโกนิโอมิเตอร์แบบอิเล็กทรอนิกส์) ซึ่งผลของการหมุนด้านล่างทำได้โดยการป้อนเสาอากาศสองทิศทางที่ตั้งฉากกันซึ่งกันและกันด้วยรูปแบบแปดในแปด เสาอากาศได้รับพลังงานจากการสั่นแบบมอดูเลตแบบสมดุลพร้อมการเปลี่ยนเฟสของกรอบการมอดูเลชั่น 90° เสาอากาศ เอ 2สนามแม่เหล็กไฟฟ้าถูกสร้างขึ้น (1.2)

ข้าว. 1.7. แผนภาพบล็อกช่อง VOR
เสาอากาศ เอ 1ไม่มีทิศทางและได้รับการออกแบบเพื่อสร้างรูปแบบการแผ่รังสีรวมประเภท "คาร์ดิโอด์" และส่งสัญญาณอ้างอิง ในการสร้างสัญญาณที่มีการมอดูเลตความถี่แอมพลิจูดสองเท่า ออสซิลเลชันจะถูกเลือกซึ่งมีความถี่สูงกว่าความถี่การหมุนด้านล่างมาก แต่น้อยกว่าความถี่ของการออสซิลเลชันของพาหะอย่างมาก และการออสซิลเลชันเหล่านี้จะถูกใช้เป็นตัวช่วย การสั่นสะเทือนเสริมเรียกว่า เรือย่อย,ซึ่งจะต้องเป็นไปตามเงื่อนไข ![]() โดยที่คือความถี่ของการสั่นของคลื่นพาหะย่อย สำหรับระบบ VOR ความถี่ซับคาริเออร์คือ เอฟ พี = 9960 เฮิรตซ์
โดยที่คือความถี่ของการสั่นของคลื่นพาหะย่อย สำหรับระบบ VOR ความถี่ซับคาริเออร์คือ เอฟ พี = 9960 เฮิรตซ์
ใน subcarrier modulator (MS) การมอดูเลตความถี่ของ subcarrier จะดำเนินการโดยใช้การแกว่งอ้างอิงที่ความถี่ เอฟโอพี =30 เฮิรตซ์ที่มีการเบี่ยงเบนความถี่ ΔF P = 480 เฮิรตซ์ที่ดัชนีการมอดูเลต ในโมดูเลเตอร์ MHF การสั่นความถี่สูงจะถูกมอดูเลตแอมพลิจูดโดยแรงดันไฟฟ้าซับคาริเออร์ที่มีความลึกของการมอดูเลชั่น
เสาอากาศ เอ 1ทำให้เกิดสนามความตึงเครียด
ค่าสัมประสิทธิ์การมอดูเลตแอมพลิจูดอยู่ที่ไหน – สัมประสิทธิ์การมอดูเลตความถี่ – ส่วนเบี่ยงเบนความถี่ย่อย
ฟิลด์รวม
![]()
ส่งผลต่อเสาอากาศของอุปกรณ์ออนบอร์ด เอ 0- ที่เอาต์พุตเสาอากาศ จะได้ค่าการแกว่งทั้งหมดของแบบฟอร์ม
สเปกตรัมแอมพลิจูด-ความถี่ของการแกว่งทั้งหมดแสดงในรูปที่ 1.8(a)

ข้าว. 1.8. สเปกตรัมแอมพลิจูดความถี่:
ก) รับสัญญาณ;
b) ซองจดหมายของสัญญาณที่ได้รับ
อุปกรณ์บนเครื่องบินจะต้องแยกสัญญาณอะซิมุทัลและสัญญาณอ้างอิงออกจากผลรวม และเปรียบเทียบในเฟส
หลังจากแปลงสัญญาณทั้งหมดในอุปกรณ์รับสัญญาณ (RD) แล้ว ให้ขยายและตรวจจับด้วยเครื่องตรวจจับแอมพลิจูด ซึ่งเป็นซองจดหมายที่ประกอบด้วยสัญญาณแอซิมุธัลและสัญญาณอ้างอิงของแบบฟอร์ม
, (1.12)
ที่ไหน และ คือแอมพลิจูดของส่วนประกอบของสัญญาณทั้งหมด
จากสเปกตรัมของสัญญาณ (1.12) แสดงในรูปที่ 1 1.8(b) จะเห็นได้ว่าสัญญาณอะซิมุทัลและสัญญาณอ้างอิงสามารถแยกได้โดยการเลือกความถี่ เพื่อจุดประสงค์นี้ สัญญาณจากเอาต์พุต PRM จะถูกป้อนไปยังฟิลเตอร์ F1 และ F2 สองตัว
ในตัวกรอง F1 ปรับตามความถี่ ( ฉ=30 เฮิรตซ์) สัญญาณอะซิมุธาลหรือสัญญาณเฟสที่แปรผันได้ถูกแยกออก และในตัวกรอง F2 ปรับไปที่ความถี่ซับคาริเออร์ ( ฉ=9960 เฮิรตซ์) คลื่นพาหะย่อยแบบมอดูเลตความถี่จะถูกเน้นไว้ หลังจากข้อจำกัดแบบสมมาตรในลิมิตแอมพลิฟายเออร์ (CA) การแกว่งอ้างอิงจะถูกแยกออกในเครื่องตรวจจับความถี่ (FD)
จากการเปลี่ยนแปลงที่เราได้รับ:
สัญญาณราบ;
สัญญาณอ้างอิง
แรงดันอ้างอิงจะจ่ายให้กับตัวเปลี่ยนเฟส FV1 และ FV2 ในตำแหน่งเริ่มต้น แกน FV1 จะถูกหมุนในมุมที่กำหนด ขซึ่งทำให้เกิดการเลื่อนเฟสเพิ่มเติมของแรงดันอ้างอิงตามจำนวน ข
และ ![]() . (1.13)
. (1.13)
แรงดันอะซิมุทัลและแรงดันอ้างอิงจะจ่ายให้กับตัวตรวจจับเฟส FD1 ความแตกต่างของเฟสระหว่างแรงดันไฟฟ้าขาเข้า
แรงดันไฟฟ้าที่เอาต์พุตของเครื่องตรวจจับเฟส FD1:
แรงดันไฟฟ้ากระแสตรงนี้จะถูกแปลง (เป็น PNV) เป็นสัญญาณแสดงข้อผิดพลาดที่ความถี่ 400 เฮิรตซ์ และจ่ายให้กับขดลวดควบคุมของมอเตอร์ไฟฟ้า (DM) ซึ่งจะหมุนแกนโรเตอร์ของตัวเปลี่ยนเฟส FV1 จนกระทั่งความต่างเฟสกลายเป็นศูนย์ ในเวลาเดียวกัน. ดังนั้น มุมการหมุนของโรเตอร์ตัวเปลี่ยนเฟส FV1 จะเท่ากับมุมราบของเครื่องบิน แกน FV1 เชื่อมต่อกับแกนของเซนเซอร์เซลซิน (SD) ซึ่งจะส่งผลการวัดไปยังตัวบ่งชี้แอซิมัท
ระบบ VOR ช่วยให้เครื่องบินบินได้ในแนวราบที่กำหนด เพื่อจุดประสงค์นี้ FD2 และ FV2 จึงถูกนำมาใช้ในวงจร แกน FV2 ถูกหมุนด้วยตนเองและตั้งค่าเป็นมุมที่กำหนด ในกรณีนี้เฟสของแรงดันอ้างอิงจะเปลี่ยนเพิ่มเติมตามจำนวนและกลายเป็น
![]() .
(1.16)
.
(1.16)
แรงดันไฟฟ้านี้จ่ายให้กับอินพุตของ FD2 อินพุตที่สองมาพร้อมกับแรงดันไฟฟ้าอะซิมุทัลพร้อมเฟส
![]() .
.
ความต่างเฟสระหว่างแรงดันอะซิมุทัลและแรงดันอ้างอิงที่อินพุต FD2
หลังจากการตรวจจับเฟสตาม (1.15) ที่เอาต์พุตของตัวตรวจจับ
.
เมื่อ และ ราบของเครื่องบินตรงกับทิศทางที่กำหนด ปัญหานี้แก้ไขได้เมื่อเครื่องบินบินเข้าหรือออกจากสัญญาณ VOR เพื่อระบุการบินไปหรือกลับจากบีคอนวิทยุ FD3 จะถูกนำเข้าไปในวงจรและป้อนเข้าไป
:: ปัจจุบัน]
พื้นฐานการนำทาง VOR
เครื่องช่วยนำทางหลักในประเทศส่วนใหญ่คือ ว.อ(ระบบนำทาง VHF OmniDirectional Range) ซึ่งแปลเป็นภาษารัสเซียเรียกว่า เครื่องระบุตำแหน่งรอบทิศทาง VHF- ระบบนำทางด้วยดาวเทียมที่ปรากฏเมื่อเร็ว ๆ นี้ไม่ได้แทนที่ VOR แต่เป็นส่วนเสริม
เครื่องบินบินไปตามสายการบินที่สร้างขึ้นจากส่วนต่างๆ ส่วนต่างๆ ก่อตัวเป็นเครือข่ายที่พันกันทั้งรัฐ สถานีวิทยุ VOR ตั้งอยู่ที่โหนดของเครือข่ายนี้ (ที่ส่วนท้ายของส่วน)
สัญญาณวิทยุ VORประกอบด้วยเครื่องส่งสัญญาณสองตัวที่ความถี่ 108.00-117.95 เมกะเฮิรตซ์- เครื่องส่ง VOR เครื่องแรกจะส่งสัญญาณคงที่ในทุกทิศทาง ในขณะที่เครื่องส่ง VOR เครื่องที่สองส่งสัญญาณอยู่ ลำแสงหมุนแคบโดยการเปลี่ยนเฟสขึ้นอยู่กับมุมการหมุน กล่าวคือ ลำแสงจะวิ่งเป็นวงกลม 360 องศา (เหมือนลำแสงประภาคาร) ผลลัพธ์ที่ได้คือรูปแบบรังสีในรูปของรังสี 360 รังสี (รังสีหนึ่งรังสีผ่านแต่ละองศาของวงกลม) อุปกรณ์รับสัญญาณจะเปรียบเทียบสัญญาณทั้งสองและกำหนด "มุมลำแสง" ที่เครื่องบินอยู่ในปัจจุบัน มุมนี้เรียกว่ารัศมี VOR
อุปกรณ์ VOR บนเครื่องบินสามารถระบุได้ว่ารัศมี VOR ใดของสถานีวิทยุที่ทราบว่าเครื่องบินนั้นเปิดอยู่

คุณสามารถค้นหาสถานี VOR ที่ต้องการได้บนแผนที่เที่ยวบิน แผนภาพด้านบนแสดงเครื่องบินในรัศมี 30 จาก VOR VOR แต่ละอันมีของตัวเอง ชื่อ(VOR ในภาพเรียกว่า KEMPTEN VOR) และ ตัวย่อสามตัวอักษร(VOR แทนด้วย KPT ในรูป) ถัดจาก VOR จะมีการเขียนความถี่ซึ่งจะต้องป้อนลงในเครื่องรับ ดังนั้นในการรับสัญญาณจาก KEMPTEN VOR คุณจะต้องป้อนความถี่ 109.60 ลงในเครื่องรับ
บ่อยครั้งที่เครื่องบินไม่ได้ติดตั้งเครื่องรับ VOR ไม่ใช่เครื่องเดียว แต่มีเครื่องรับ VOR สองตัว ในกรณีนี้เครื่องรับหนึ่งเรียกว่า NAV 1 และตัวที่สองตามลำดับคือ NAV 2 หากต้องการป้อนความถี่ลงในเครื่องรับ VOR ให้ใช้ปุ่มกลมคู่ ส่วนใหญ่ใช้ในการกรอกจำนวนเต็ม ส่วนส่วนที่เล็กกว่าจะใช้กรอกเศษส่วนของความถี่ VOR แผงควบคุมการนำทางด้วยวิทยุทั่วไปจะแสดงอยู่ด้านล่าง

หลักความถี่ VOR จะมีป้ายกำกับเป็นสีแดง นี่คือประเภทเครื่องรับที่ง่ายที่สุดที่ให้คุณป้อนความถี่ VOR ได้เพียงความถี่เดียวเท่านั้น ระบบที่ซับซ้อนมากขึ้นทำให้คุณสามารถป้อนความถี่ VOR สองความถี่พร้อมกันและสลับระหว่างความถี่เหล่านี้ได้อย่างรวดเร็ว ความถี่ VOR หนึ่งความถี่คือ ไม่ได้ใช้งาน(STAND BY) ก็เปลี่ยนตามที่จับ ตัวตั้งความถี่- ความถี่ VOR ที่สองเรียกว่า คล่องแคล่ว(ACTIVE) นี่คือความถี่ VOR ที่เครื่องรับปรับอยู่ในปัจจุบัน

รูปด้านบนแสดงตัวอย่างเครื่องรับที่มีความถี่หลัก VOR สองตัว ใช้งานง่ายมาก: คุณต้องป้อนความถี่ VOR ที่ต้องการโดยใช้ปุ่มหมุนกลม จากนั้นเปิดใช้งานโดยใช้สวิตช์ เมื่อคุณเลื่อนเมาส์ไปเหนือล้อตัวเลือก เคอร์เซอร์ของเมาส์จะเปลี่ยนรูปร่าง หากดูเหมือนลูกศรเล็ก ๆ เมื่อคุณคลิกเมาส์ ส่วนที่สิบจะเปลี่ยนไป หากลูกศรมีขนาดใหญ่ ตัวเลขทั้งส่วนก็จะเปลี่ยนไป
นอกจากนี้ควรมีอุปกรณ์ในห้องนักบินที่แสดงว่าเครื่องบินอยู่ในรัศมี VOR ใด โดยปกติแล้วอุปกรณ์นี้เรียกว่า NAV 1 หรือ VOR 1 ตามที่เราทราบแล้วว่าเครื่องบินอาจมีอุปกรณ์ดังกล่าวชิ้นที่สอง มีสองตัวบน Cessna 172:

อุปกรณ์ประกอบด้วย:
- มาตราส่วนที่สามารถเคลื่อนย้ายได้คล้ายกับมาตราส่วนเข็มทิศ
- ปุ่มหมุน OBS แบบกลม
- ลูกศรชี้ทิศทาง TO-FROM
- แบนเนอร์ จีเอส
- สองแถบแนวตั้งและแนวนอน
แถบแนวนอนและแบนเนอร์ GS ใช้สำหรับการลงจอดของ ILS
ปุ่ม OBS หมุนแป้นหมุนที่กำลังเคลื่อนที่ และด้วยเหตุนี้จึงปรับตัวรับ VOR ให้เป็นรัศมีที่ต้องการ ตัวอย่างเช่น นี่คือลักษณะของอุปกรณ์เมื่อปรับเป็นรัศมี 30:

รูปภาพแสดงให้เห็นว่าเมื่อคุณหมุนปุ่ม OBS สเกลจะหมุน และมุมด้านบนจะชี้ไปที่จำนวนรัศมีปัจจุบัน เช่นเดียวกับเข็มทิศ ตัวเลขทั้งหมดบนอุปกรณ์จะเขียนด้วยหาร 10 ดังนั้นเลข 3 จึงหมายถึง รัศมี 30.
แถบแนวตั้งแสดงความเบี่ยงเบนจากรัศมี หากระนาบอยู่บนแนวรัศมี แถบจะอยู่ในแนวตั้ง:

หากเครื่องบินเคลื่อนไปทางขวาของรัศมี แถบแนวตั้งจะเบี่ยงเบนไปทางซ้ายเพื่อระบุว่าคุณควรบินไปทางด้านซ้ายของรัศมี

เมื่อนักบินเห็นภาพดังกล่าว เขารู้ว่าเมื่อจะเข้าสู่รัศมีนั้นจะต้องเลี้ยวซ้าย กฎนั้นง่ายมาก: แถบจะแสดงในทิศทางที่คุณต้องการบิน
รูปภาพที่คล้ายกันจะปรากฏขึ้นหากระนาบอยู่ทางด้านซ้ายของรัศมีที่ต้องการ:

โปรดทราบว่าในกรณีนี้ ระนาบเบี่ยงเบนไปจากรัศมีมากขึ้นและแถบเครื่องมือก็เบี่ยงเบนมากขึ้นเช่นกัน
คุณลักษณะที่สำคัญของ VOR ก็คือ อุปกรณ์จะแสดงรัศมีที่เครื่องบินตั้งอยู่เสมอ โดยไม่คำนึงถึงทิศทางที่เครื่องบินกำลังเดินทางอยู่ ตัวอย่างเช่น รูปภาพด้านล่างแสดงเครื่องบินที่บินในเส้นทางต่างๆ เนื่องจากพวกมันอยู่บนรัศมีเดียวกันและมีการตั้งค่า OBS เหมือนกัน VOR ของเครื่องบินทุกลำจึงจะแสดงสิ่งเดียวกัน

เมื่อบินโดย VOR คุณต้องจำไว้ว่าความไวของอุปกรณ์ VOR จะเพิ่มขึ้นเมื่อคุณเข้าใกล้สัญญาณ VOR จนกระทั่งหายไปในบริเวณใกล้เคียงกับสัญญาณ ใกล้กับสัญญาณ VOR ไม่จำเป็นต้องไล่ตามคาน แต่เมื่อความไวมากเกินไป คุณควรเคลื่อนที่ต่อไปในเส้นทางเดิมจนกว่าเครื่องบินจะผ่านสัญญาณ VOR
ดังนั้น, เพื่อบินไปตามรัศมี VORคุณต้องตั้งค่าความถี่ VOR บนเครื่องรับ กำหนดจำนวนรัศมีที่ต้องการโดยใช้ OBS และถือแถบแนวตั้งไว้ที่กึ่งกลางของอุปกรณ์ หากแถบเบี่ยงเบนไปทางซ้าย คุณต้องเลี้ยวไปทางซ้าย ถ้าไปทางขวาก็ต้องเลี้ยวขวา ในกรณีที่มีลมพัดผ่าน คุณจะต้องเลี้ยวเป็นลมเพื่อชดเชยการดริฟท์ของเครื่องบิน คุณสามารถอ่านเพิ่มเติมเกี่ยวกับการบินไปตามสายลมได้ในบทความเกี่ยวกับการนำทาง NDB
ระบบนำทาง VOR ในทิศทางย้อนกลับ
เราตรวจสอบเที่ยวบินแล้ว ไปทาง VOR- คุณสามารถบินได้ในลักษณะเดียวกัน ทิศทางย้อนกลับ.

โปรดทราบว่าขณะนี้มุมทิศทางจะแสดงขึ้น จารึก FRซึ่งหมายความว่าเครื่องบินกำลังเคลื่อนที่ไปในทิศทางนั้น จาก ว.อ- ระนาบในภาพเบี่ยงไปทางขวาเล็กน้อย แถบบนอุปกรณ์จึงแสดงว่ารัศมีอยู่ทางซ้าย
ข้อผิดพลาดทั่วไป มุ่งมั่นโดยหลาย ๆ คนคือการติดตั้ง เลขรัศมีผิด- หากในรูปด้านบน นักบินได้ตั้งค่ารัศมี 120 แทนที่จะเป็นรัศมี 30 ลูกศรก็จะแสดง ทิศทางถึงและแท่งก็จะเบี่ยงเบนไปในทิศทางตรงกันข้าม ดังนั้นจึงเป็นเรื่องสำคัญมากที่จะต้องกำหนดทิศทางในแนวรัศมีให้ถูกต้องและควบคุมตำแหน่งของ VOR ตามมุม ถึง-จาก.
การจดจำวิธีตั้งค่ารัศมีอย่างถูกต้องนั้นง่ายมาก: เลขรัศมีคือเส้นทางที่เครื่องบินควรบินเมื่อเคลื่อนที่ไปตามรัศมีในสภาพอากาศสงบ ไม่สำคัญว่าเครื่องบินจะบินจาก VOR หรือมุ่งหน้าไปหาเครื่อง ให้ป้อนหัวข้อที่คุณต้องการบินไปยัง OBS เสมอ ตัวเลขรัศมี VOR สอดคล้องกับส่วนหัวที่แท้จริง ไม่ใช่ส่วนหัวแม่เหล็ก
การกำหนดรัศมี VOR ปัจจุบัน
บางครั้งคุณจำเป็นต้องพิจารณาว่าเครื่องบินอยู่ในรัศมีใด ในการดำเนินการนี้ คุณจะต้องหมุนแป้นหมุน OBS จนกระทั่งลูกศรทิศทางบนอุปกรณ์ชี้ไป ถึงและแถบโก่งจะไม่เป็นแนวตั้งอย่างเคร่งครัด ด้วยการวางแผนเลขรัศมี VOR ที่ได้รับบนแผนที่ คุณสามารถประมาณตำแหน่งของคุณได้ แต่วิธีนี้จะไม่แสดงระยะห่างถึง VOR
แต่สถานี VOR ก็สามารถมีอุปกรณ์เรนจ์ไฟนได้ (DME - อุปกรณ์วัดระยะทาง) สถานีวิทยุที่มีอุปกรณ์ดังกล่าวจะแสดงบนแผนที่เป็น VOR-DME หรือ VORTAC คุณจะเห็นระยะทางเป็น NM ไปยังสถานี VOR บนแผงหน้าปัดในหน้าต่าง DME1 หรือ DME2 ตามลำดับ เมื่อทราบขนาดของแผนที่แล้ว คุณสามารถทำเครื่องหมายบนรัศมี VOR ตำแหน่งที่แน่นอนของเครื่องบินในช่วงเวลาที่กำหนดได้
บ่อยครั้งที่ระยะทาง DME ที่คุณเห็นบนแดชบอร์ดไม่ตรงกับระยะทางบนแผนที่ นี่คือระยะห่างจากสถานีวิทยุ VOR ภาคพื้นดินถึงเครื่องบินของคุณที่บินที่ระดับความสูงที่กำหนด เหล่านั้น. นี่คือด้านตรงข้ามมุมฉากของสามเหลี่ยมมุมฉาก โดยขาข้างหนึ่งเป็นระดับความสูงของคุณ และขาที่สองคือระยะทางบนพื้นจากสถานีวิทยุ VOR ไปยังจุดที่คุณกำลังบินอยู่ ข้อมูลนี้จะไม่ถูกต้องเป็นพิเศษเมื่อคุณอยู่ใกล้กับสถานีวิทยุ VOR (การบินเหนือสถานีดังกล่าวโดยตรงจะทำให้คุณทราบระดับความสูง) ดังนั้น คุณจะต้องจองหนึ่งหรือสองไมล์หากทางเดินในน่านฟ้าควบคุมจำเป็นต้องติดต่อกับผู้มอบหมายงานเมื่อบินผ่านสถานี VOR
การสกัดกั้นรัศมี VOR เฉพาะ
งานนำทางทั่วไปคือการสกัดกั้นรัศมีเฉพาะ เช่น เราต้องเข้าไปในทางเดินหายใจที่วิ่งตามแนวรัศมี VOR เส้นที่ 30 เรารู้ว่าเราอยู่ที่ไหนสักแห่งทางด้านซ้ายของรัศมี (และถ้าเราไม่ทราบ เราก็สามารถระบุได้ตามที่อธิบายไว้ข้างต้น):
สิ่งแรกที่เราต้องทำคือปรับความถี่ VOR และป้อนรัศมีที่ต้องการโดยใช้แป้นหมุน OBS อุปกรณ์จะแสดงข้อความดังนี้:

จากนี้เราจะเห็นว่ารัศมีอยู่ที่ไหนสักแห่งทางด้านขวามาก ตอนนี้เราต้องตัดสินใจว่าเราจะตัดรัศมีมุมใด วิธีที่เร็วที่สุดในการสกัดกั้นรัศมีคือการบินตั้งฉากกับรัศมี แต่จะไม่ทำให้เราเข้าใกล้จุดสุดท้ายของเส้นทางมากขึ้น เราเลือกการประนีประนอมที่สมเหตุสมผลและเคลื่อนที่เป็นมุม 40 องศากับแนวรัศมี เนื่องจากรัศมีอยู่ทางขวา เพื่อที่จะได้ระยะสกัดกั้น เราจึงบวกมุมสกัดกั้น (40 องศา) เข้ากับเส้นรัศมี (30 องศา) และเราจะได้เส้นสกัดกั้น (70 องศา) ถ้ารัศมีอยู่ทางซ้าย มุมสกัดกั้นจะต้องถูกลบออก
หันไปที่เส้นทางสกัดกั้นที่ได้รับ (70 องศา) แล้วเริ่มเส้นทางไปยังรัศมี:

เส้นประสีแดงแสดงเส้นทางสกัดกั้น คุณต้องบินในเส้นทางนี้จนกว่าเครื่องมือจะแสดงว่าเครื่องบินอยู่ในแนวรัศมี:

สิ่งที่เหลืออยู่คือการหมุนกลับและบินไปตามเส้นทางรัศมี 30 องศา เพื่อไม่ให้บินผ่านรัศมี คุณต้องเริ่มเลี้ยวล่วงหน้าโดยไม่ต้องรอจนกว่าแถบจะอยู่ในแนวตั้งอย่างเคร่งครัด
เปลี่ยนจากรัศมีหนึ่งไปอีกรัศมีหนึ่ง
บางครั้งสถานการณ์เกิดขึ้นเมื่อคุณต้องการเปลี่ยนจากรัศมีหนึ่งไปอีกรัศมีหนึ่ง อาจจำเป็นเมื่อเคลื่อนที่จากเส้นทางบินหนึ่งไปยังอีกเส้นทางหนึ่ง พิจารณาตัวอย่างต่อไปนี้ที่แสดงในแผนภาพ:

สมมติว่าเครื่องบินจำเป็นต้องบินในรัศมี 30 จาก VOR 1 ไปยังจุด FIX หลังจากนั้นจะต้องหมุนทิศทาง 90 องศาและเคลื่อนไปทาง VOR 2 ปัญหานี้แก้ไขได้อย่างง่ายดายโดยใช้ตัวรับ VOR สองตัวพร้อมกัน ในเครื่องรับ NAV1 เราป้อนความถี่ VOR 1 และปรับเป็นรัศมี 30 ในเครื่องรับ NAV2 - ความถี่ VOR 2 และรัศมี 90 องศา:

ตัวรับสัญญาณด้านบนซึ่งปรับเป็น VOR 1 แสดงให้เห็นว่าเครื่องบินอยู่ในรัศมี 30 องศาพอดีและกำลังบินเข้าหาเครื่องบิน อันล่างปรับเป็น VOR 2 บอกว่ารัศมี 90 องศายังห่างไกล เราเคลื่อนที่ต่อไปตามรัศมีจนกระทั่งตัวรับสัญญาณตัวที่สองแสดงว่าเรากำลังเข้าใกล้รัศมี 90 องศา:
โดยไม่ต้องรอให้เข็ม VOR 2 ตั้งในแนวตั้งอย่างเคร่งครัด เราจะเริ่มหมุน 90 องศาล่วงหน้า หลังจากเลี้ยวแล้ว สิ่งที่เหลืออยู่คือเคลื่อนที่ต่อไปในรัศมี 90 องศาไปทาง VOR 2:
เครื่องรับ NAV1ไม่จำเป็นอีกต่อไป และควรปรับเป็นความถี่ที่ไม่มีอยู่จริงจะดีกว่า เพื่อไม่ให้เกิดความสับสนกับ NAV2 ซึ่งใช้งานอยู่ในปัจจุบันโดยไม่ได้ตั้งใจ
ขอแนะนำให้คุณเริ่มฝึกใช้เครื่องจำลอง VOR ซึ่งอยู่ที่: http://www.luizmonteiro.com/Learning_VOR_Sim.htm- พยายามปรับให้เข้ากับรัศมีและ "บิน" ไปตามมันในเครื่องบิน โดยสังเกตว่าลูกศรจะเบี่ยงเบนไปตรงไหนเมื่อคุณเคลื่อนตัวออกจากรัศมีไปในทิศทางเดียวหรืออีกทิศทางหนึ่ง
ข้อจำกัดของการนำทาง VOR
ระบบนำทาง VOR มีราคาค่อนข้างแพงในระดับประเทศ ความจริงก็คืออุปกรณ์ VOR มี ข้อ จำกัดในระยะเช่นเดียวกับสถานีวิทยุ VHF หรือหอส่งสัญญาณโทรทัศน์ วิทยุ VHF ทำงานในแนวสายตาเท่านั้น ซึ่งหมายความว่าสิ่งกีดขวางอาจบดบังวิทยุ VOR ของคุณจนกว่าคุณจะไปถึงระดับความสูงที่เพียงพอ ช่วงของสัญญาณ VOR เองก็มีจำกัดเช่นกัน สูงถึง 5,500 เมตร คุณสามารถรับสัญญาณ VOR ได้ที่ระยะ 40-130 NM ขึ้นอยู่กับภูมิประเทศ ยิ่งไปกว่านั้น สามารถรับสัญญาณ VOR ได้ที่ระยะสูงสุด 130 NM
©2007-2014 สายการบินเสมือนจริง เอ็กซ์แอร์เวย์
| [:: ปัจจุบัน] | |
สัญญาณเตือนรอบทิศทาง(ภาษาอังกฤษ) วีความถี่สูงมาก โอวิทยุทิศทาง mni รคำย่อแองเจิล วีโออาร์) ให้ข้อมูลเกี่ยวกับราบของเครื่องบิน สัญญาณวิทยุสามารถทำงานแยกกันหรือใช้ร่วมกับเรนจ์ไฟนเดอร์ DME ทำให้เกิดระบบนำทางระยะสั้นแบบแอซิมัท วีโออาร์/ดีเอ็มอี.
สัญญาณ VOR จะส่งเสียงที่ความถี่คลื่นใดความถี่หนึ่งจาก 160 คลื่นความถี่ (ตั้งแต่ 108 ถึง 117.975 MHz ในขั้นละ 50 KHz) สัญญาณเฟสอ้างอิงและตัวแปรความถี่ 30Hz.
สัญญาณเฟสอ้างอิงแบบมอดูเลตความถี่แอมพลิจูดที่มีมอดูเลตความถี่ ผู้ให้บริการย่อย(9960Hz โดยมีส่วนเบี่ยงเบนบวกหรือลบ 480Hz) ปล่อยออกมาจากเสาอากาศรอบทิศทางแบบคงที่ สัญญาณเฟสแปรผันแบบมอดูเลตแบบแอมพลิจูดที่มีความถี่ 30 เฮิรตซ์ ปล่อยออกมาจากเสาอากาศแบบหมุน (30 รอบต่อนาที) ที่มีรูปแบบการแผ่รังสีรูปแปดในแปด
รูปแบบทิศทางที่พับในอวกาศก่อให้เกิดสนามของแอมพลิจูดที่แปรผัน ซึ่งเปลี่ยนแปลงด้วยความถี่ 30 เฮิรตซ์ สัญญาณ VOR ถูกจัดวางเพื่อให้เฟสของสัญญาณอ้างอิงและสัญญาณสลับตรงกันในทิศทาง เส้นเมริเดียนเหนือแม่เหล็ก- เมื่อสักครู่นี้ ขีดสุดรูปแบบทิศทางของสนามหมุนที่อยู่ตรงนั้น ความถี่ของสัญญาณ ผู้ให้บริการย่อยมีค่าสูงสุด (1020Hz) ในทิศทางอื่น การเปลี่ยนเฟสจะแตกต่างกันไปตั้งแต่ศูนย์ถึง 360 องศา ด้วยวิธีที่เรียบง่าย คุณสามารถนึกถึง VOR ว่าเป็นสัญญาณวิทยุที่ส่งสัญญาณของตัวเองในแต่ละทิศทาง จำนวน "สัญญาณแอซิมัท" ดังกล่าวถูกกำหนดโดยความไวของอุปกรณ์บนเครื่องบินต่อขนาดของการเปลี่ยนเฟสเท่านั้น ซึ่งเป็นสัดส่วนโดยตรงกับราบปัจจุบันของเครื่องบินที่สัมพันธ์กับบีคอนวิทยุ ในบริบทนี้ แทนที่จะใช้แนวคิด "ราบ" จะใช้คำนี้ รัศมี (VOR เรเดียล)- เป็นที่ยอมรับกันโดยทั่วไปว่าจำนวนรัศมีคือ 360 จำนวนรัศมีเกิดขึ้นพร้อมกับค่าตัวเลขของราบแม่เหล็ก
นอกเหนือจากการระบุแนวราบแล้ว ตัวบ่งชี้ VOR บนเครื่องบินยังช่วยให้คุณนำทางเครื่องบินในโหมด "จาก" และ "ถึง" ของสัญญาณวิทยุในแนวราบที่กำหนดได้ เพื่อจุดประสงค์นี้ ตัวบ่งชี้ VOR มีแถบที่เกี่ยวข้องซึ่งแสดงความเบี่ยงเบนของเครื่องบินจาก LZP ดังนั้น LZP จะต้องผ่านตัวบีคอนโดยตรง
เพื่อระบุบีคอน VOR ความถี่พาหะจะถูกจัดการโดยใช้รหัสมอร์สที่มีสัญญาณ 1,020 เฮิร์ตซ์ นอกจากนี้ สัญญาณการโทรยังสามารถส่งสัญญาณด้วยเสียงโดยใช้การบันทึกแบบแม่เหล็ก
หลักการที่คล้ายกันในการสร้างระบบ goniometric ช่วยให้เนื่องจากความซับซ้อนของส่วนพื้นดินของคอมเพล็กซ์ทำให้อุปกรณ์ที่ติดตั้งบนเครื่องบินง่ายขึ้น (อ่าน - ลดขนาดและน้ำหนัก) ในเวลาเดียวกัน ไม่ต้องสงสัยเลยว่านี่เป็นหนึ่งในปัจจัยหลักที่กำหนดการใช้งานระบบ VOR อย่างแพร่หลายรวมถึงในการบินขนาดเล็กด้วย
บีคอน VOR มีให้เลือกสองเวอร์ชัน:
- หมวด A(ด้วยระยะประมาณ 370 กม. ที่ระดับความสูงของการบิน 8-10 กม. เพื่อความมั่นใจในการบินตามเส้นทางบิน)
- หมวด B(มีระยะให้บริการภายในสนามบินประมาณ 40 กม.)
ในบรรดาอุปกรณ์ภายในบ้าน อะนาล็อกของระบบ VOR/DME สามารถเรียกว่า RSBN ได้ ซึ่งโดยทั่วไปแล้วจุดประสงค์การใช้งานจะเหมือนกัน นั่นคือการกำหนดช่วงและราบ อย่างไรก็ตาม เพื่อแก้ไขปัญหาการนำทางเพิ่มเติม (ส่วนใหญ่เป็นปัญหาทางทหาร) RSBN ถูกสร้างขึ้นบนหลักการที่แตกต่างกัน และจำเป็นต้องติดตั้งอุปกรณ์ที่แตกต่างกันโดยสิ้นเชิงบนเรือ
บีคอนวิทยุ เช่นเดียวกับบีคอนทั่วไป ใช้สำหรับการนำทางและระบุตำแหน่งของเรือ เพื่อกำหนดทิศทางไปยังสัญญาณวิทยุ นักบินจำเป็นต้องมีเข็มทิศวิทยุ
กปปส. และ ว.อ
น.ดี.บี. (สัญญาณเตือนแบบไม่มีทิศทาง) – สถานีวิทยุขับเคลื่อน (PRS) – สัญญาณวิทยุที่ทำงานบนคลื่นกลางในช่วง 150-1750 kHz เครื่องรับวิทยุ AM-FM ในบ้านที่ง่ายที่สุดสามารถรับสัญญาณจากบีคอนดังกล่าวได้
ผู้อยู่อาศัยในเซนต์ปีเตอร์สเบิร์กสามารถปรับเครื่องรับให้เป็นความถี่ 525 kHz และได้ยินรหัสมอร์ส: "PL" หรือ dot-dash-dash-dot, dot-dash-dot-dot นี่คือสัญญาณวิทยุ NDB ท้องถิ่นที่ต้อนรับเราจากปูลโคโว
เพื่อนร่วมงานคนหนึ่งของ Virpil ซึ่งเปรียบเทียบหลักการทำงานของบีคอน NDB และ VOR ให้การเปรียบเทียบที่น่าสนใจ ลองนึกภาพว่าคุณและเพื่อนหลงอยู่ในป่า เพื่อนของคุณตะโกนว่า “ฉันอยู่นี่!” คุณกำหนดทิศทางของเสียง: เมื่อพิจารณาจากเข็มทิศ ราบคือ 180 องศา นี่คือเอ็นดีบี
แต่ถ้าเพื่อนของคุณตะโกน:“ ฉันอยู่นี่ - รัศมีเป็น 0 องศา!” ตอนนี้นี่คือ VOR
ว.อ (ช่วงวิทยุรอบทิศทาง VHF) – สัญญาณวิทยุอะซิมุธัลรอบทิศทาง (RMA) ซึ่งทำงานที่ความถี่ในช่วง 108 – 117.95 MHz
NDB ส่งสัญญาณเดียวกันในทุกทิศทาง และ VOR จะออกอากาศข้อมูลเกี่ยวกับมุมระหว่างทิศทางเหนือและทิศทางไปยังเครื่องบินโดยสัมพันธ์กับตัวเองหรือกล่าวอีกนัยหนึ่ง - RADIAL

ไม่ชัดเจน? เอาเป็นว่าอีกวิธีหนึ่ง VOR ในแต่ละทิศทางห่างจากตัวมันเอง ตั้งแต่ 0 ถึง 360 องศา จะปล่อยสัญญาณที่เป็นเอกลักษณ์ พูดคร่าวๆ ก็คือ 360 สัญญาณเป็นวงกลม แต่ละสัญญาณจะมีข้อมูลเกี่ยวกับมุมราบของจุดใดๆ ที่สัมพันธ์กับบีคอนที่รับสัญญาณนี้ สัญญาณลำแสงเหล่านี้เรียกว่ารัศมี ไปทางเหนือส่งสัญญาณ 0 (ศูนย์) องศา ไปทางทิศใต้ – 180 องศา
หากเครื่องรับ AM/FM มือสมัครเล่นของคุณสามารถรับความถี่ VOR และถอดรหัสได้ เมื่อได้รับสัญญาณดังกล่าว คุณจะได้ยิน: “ฉันเป็นสัญญาณ SPB รัศมี 90 องศา” ซึ่งหมายความว่าร่างกายของคุณตั้งอยู่ทางทิศตะวันออกจากประภาคารอย่างเคร่งครัด - 90 องศา ซึ่งหมายความว่าหากคุณไปทางทิศตะวันตกอย่างเคร่งครัด - มุ่งหน้าไปที่ 270 องศา - ไม่ช้าก็เร็วคุณจะเห็นประภาคารแห่งนี้อยู่ตรงหน้าคุณ
คุณสมบัติที่สำคัญที่สุดของ VOR สำหรับเราคือความสามารถในการนำร่องไปยังแหล่งสัญญาณของบีคอนนี้โดยอัตโนมัติตามเส้นทางที่เลือก ในการดำเนินการนี้ เครื่องรับการนำทางจะถูกปรับไปที่ความถี่สัญญาณวิทยุ และเลือกเส้นทางเข้าใกล้บนแผงระบบอัตโนมัติ

จะกำหนดระยะห่างจากประภาคารได้อย่างไร? ต้องใช้เวลานานเท่าใดจึงจะไปถึงที่นั่น? นั่นคือสิ่งที่ DME มีไว้เพื่อ
ดีเอ็มอี (อุปกรณ์วัดระยะทาง) – สัญญาณวิทยุแบบรอบทิศทางหรือ RMD หน้าที่ของเขาคือให้ข้อมูลเกี่ยวกับระยะห่างระหว่างเขากับเครื่องบินของเรา
โดยปกติแล้ว DME จะรวมกับ VOR และสะดวกมากที่จะมีข้อมูลเกี่ยวกับตำแหน่งของเราที่สัมพันธ์กับบีคอนและระยะห่างจากบีคอน เท่านั้น เพื่อกำหนดระยะทางนี้ เครื่องบินจะต้องส่งสัญญาณคำขอ DME ตอบกลับ และอุปกรณ์ออนบอร์ดจะคำนวณระยะเวลาที่ผ่านไประหว่างการส่งคำขอและรับการตอบกลับ ทุกอย่างเกิดขึ้นโดยอัตโนมัติ
VOR/DME มีประโยชน์อย่างมากเมื่อลงจอด
ไอแอลเอส
ระบบสนามและเส้นทางร่อน - ILS นี่คือระบบนำทางด้วยวิทยุ บางทีร้อยละ 90 ของสนามบินที่มีเครื่องบินขนาดใหญ่เช่นแผ่นดินของเราติดตั้งอยู่
ILS ควรเป็นที่รู้จักในนาม “พระบิดาของเรา” ILS ทำให้การลงจอดไม่เพียงแต่สะดวกสบาย แต่ยังปลอดภัยอีกด้วย มีสนามบินหลายแห่งที่วิธีการลงจอดแบบอื่นเป็นไปไม่ได้หรือยอมรับไม่ได้ด้วยซ้ำ
จากชื่อของระบบ จะเป็นไปตามนั้น เครื่องบินจะปรับแนวให้ตรงกับแกนของทางวิ่ง (ระบบส่วนหัว) โดยอัตโนมัติ และจะเข้าสู่เส้นทางเครื่องร่อนและรักษาไว้โดยอัตโนมัติ (ระบบเส้นทางเครื่องร่อน)
มีบีคอนวิทยุสองตัวติดตั้งอยู่บนพื้น: เครื่องระบุตำแหน่งและทางลาดร่อน


สัญญาณหลักสูตร– เคอาร์เอ็ม – ( โลคัลไลเซอร์) ชี้เครื่องบินไปทางรันเวย์ในระนาบแนวนอน นั่นคือ ตามแนวเส้นทาง
ประภาคารเส้นทางร่อน– สายพานไทม์มิ่ง – ( เครื่องร่อนหรือ Glidepath) นำเครื่องบินขึ้นสู่รันเวย์ในระนาบแนวตั้ง - ตามแนวเครื่องร่อน
เครื่องหมายวิทยุ
บีคอนเครื่องหมายเป็นอุปกรณ์ที่ช่วยให้นักบินสามารถกำหนดระยะห่างจากรันเวย์ได้ บีคอนเหล่านี้จะส่งสัญญาณขึ้นด้านบนเป็นลำแสงแคบ และเมื่อเครื่องบินบินผ่านเครื่องบินโดยตรง นักบินก็รู้เรื่องนี้